Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 11 abril 2025
Robotics, Free Full-Text
Sensors, Free Full-Text

Working principle. (a) Initial assembled position. (b) Lock of ball joint.

The design of the proposed 4-DoF robotic mechanism. (b) The link

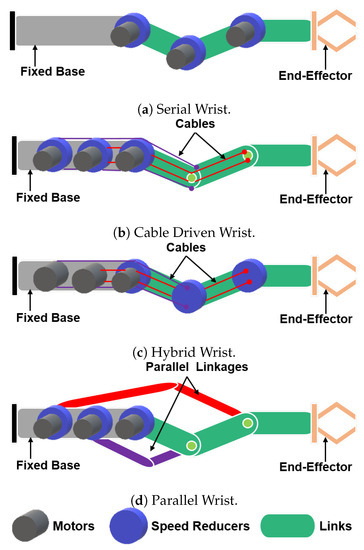
Robotic Arm Design: Types & Components of Robotic Arms
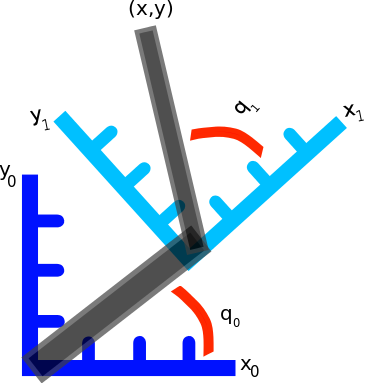
Robot control part 2: Jacobians, velocity, and force

Mechanical design (a) and section (b) of the lockable spherical joint.

CIMAR

A Light Space Manipulator with High Load-to-Weight Ratio: System Development and Compliance Control
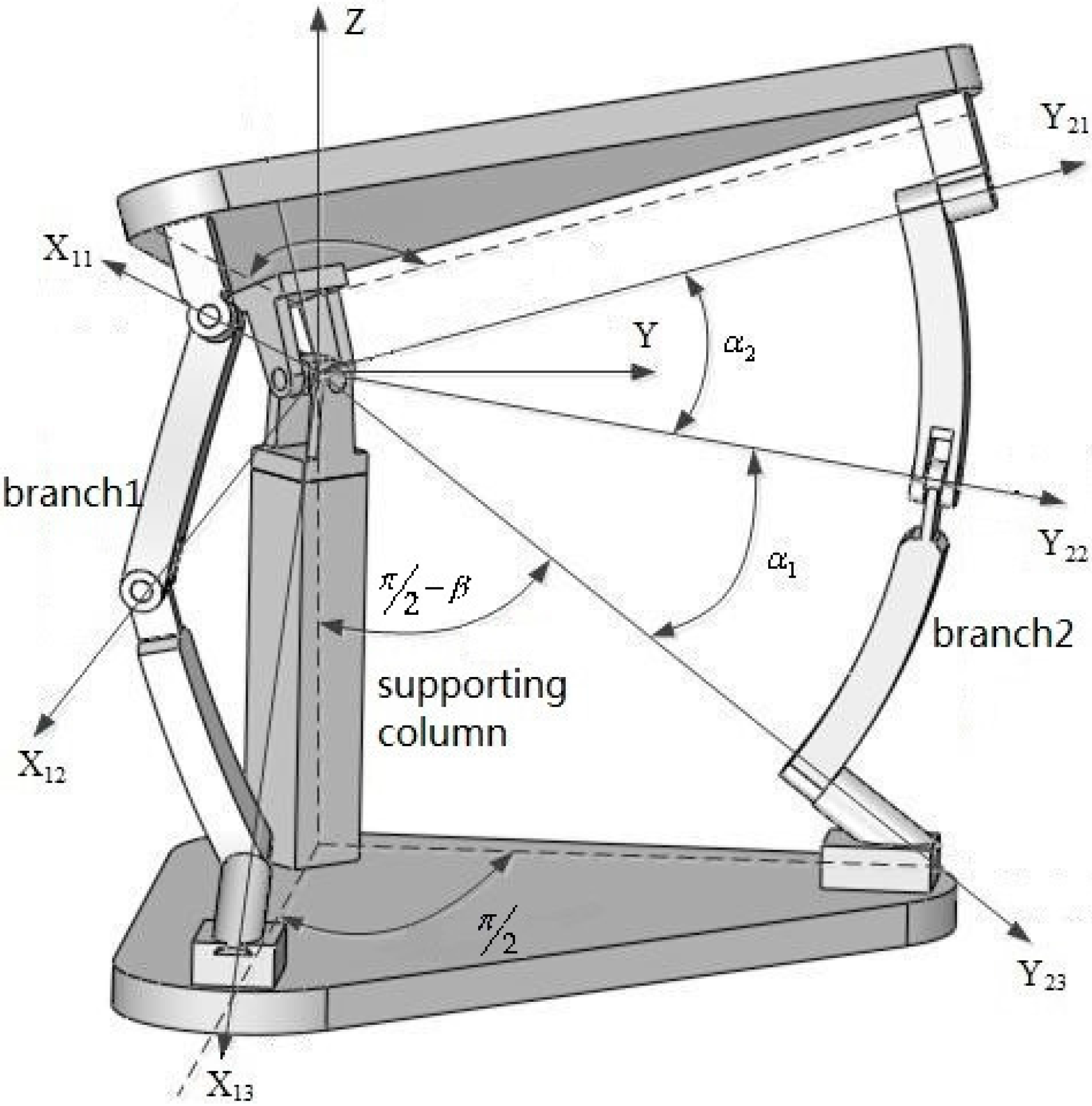
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)
Recomendado para você
-
 Mechanical Properties Bending Strength (N/mm 2 )11 abril 2025
Mechanical Properties Bending Strength (N/mm 2 )11 abril 2025 -
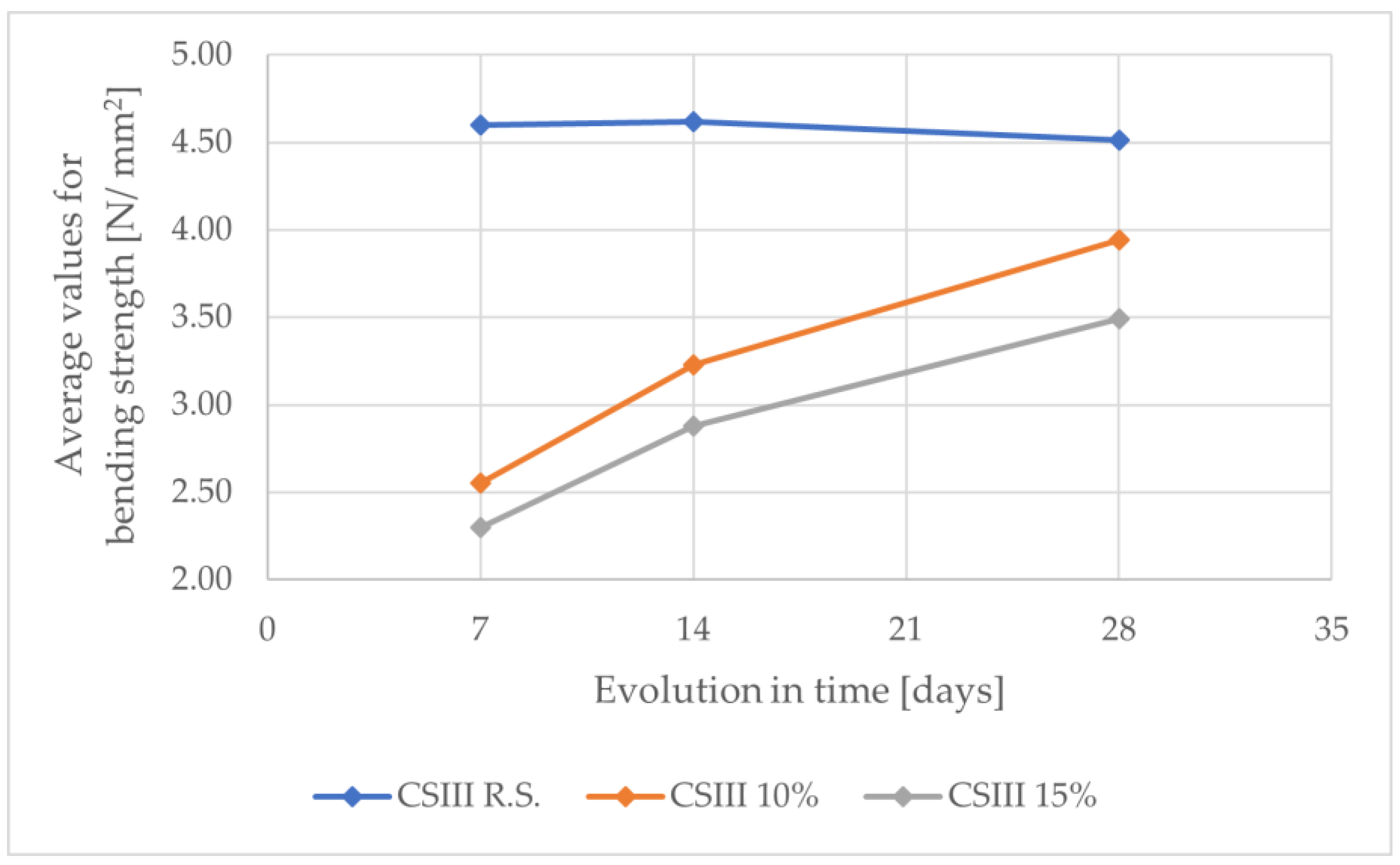 Buildings, Free Full-Text11 abril 2025
Buildings, Free Full-Text11 abril 2025 -
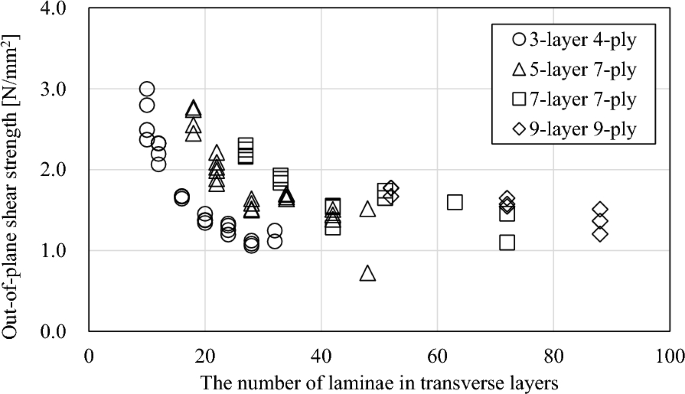 Out-of-plane shear strength of cross-laminated timber made of Japanese Larch (Larix kaempferi) with various layups and spans, Journal of Wood Science11 abril 2025
Out-of-plane shear strength of cross-laminated timber made of Japanese Larch (Larix kaempferi) with various layups and spans, Journal of Wood Science11 abril 2025 -
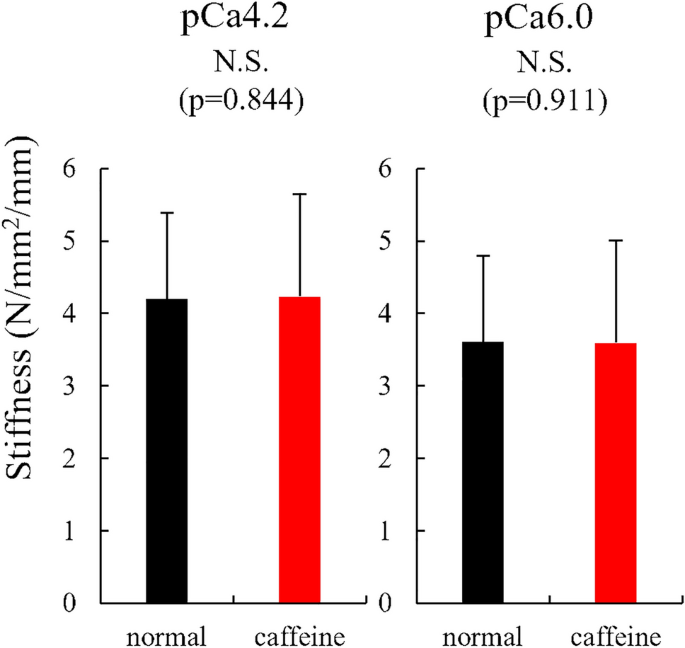 Influence of caffeine on the maximal isometric and concentric force produced by skinned fibers11 abril 2025
Influence of caffeine on the maximal isometric and concentric force produced by skinned fibers11 abril 2025 -
 7.0mm 1670 N/mm2 Spiral PC Wire - China Steel Wire, PC Wire11 abril 2025
7.0mm 1670 N/mm2 Spiral PC Wire - China Steel Wire, PC Wire11 abril 2025 -
 Effect of Storage Medium and Aging Duration on Mechanical Properties of Self-Adhesive Resin-Based Cements - Anja Liebermann, Nicoleta Ilie, Malgorzata Roos, Bogna Stawarczyk, 201711 abril 2025
Effect of Storage Medium and Aging Duration on Mechanical Properties of Self-Adhesive Resin-Based Cements - Anja Liebermann, Nicoleta Ilie, Malgorzata Roos, Bogna Stawarczyk, 201711 abril 2025 -
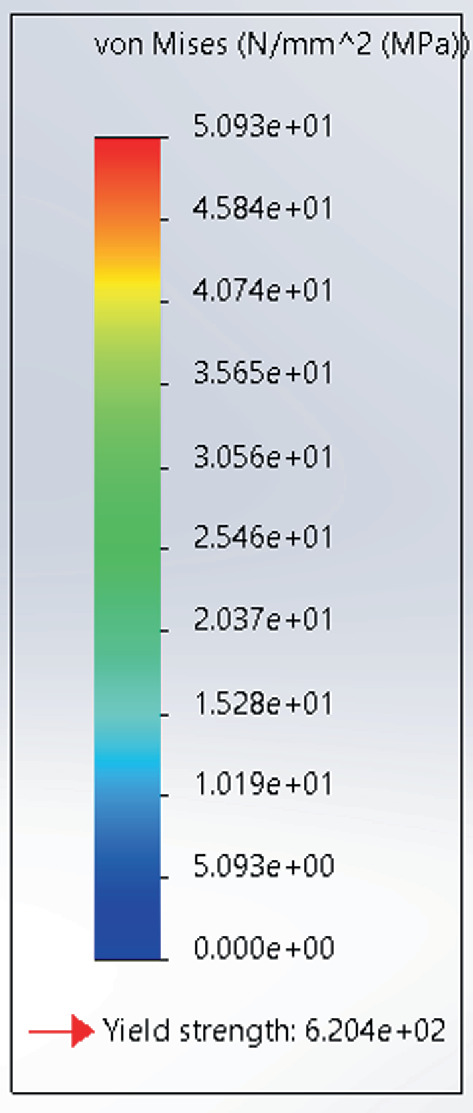
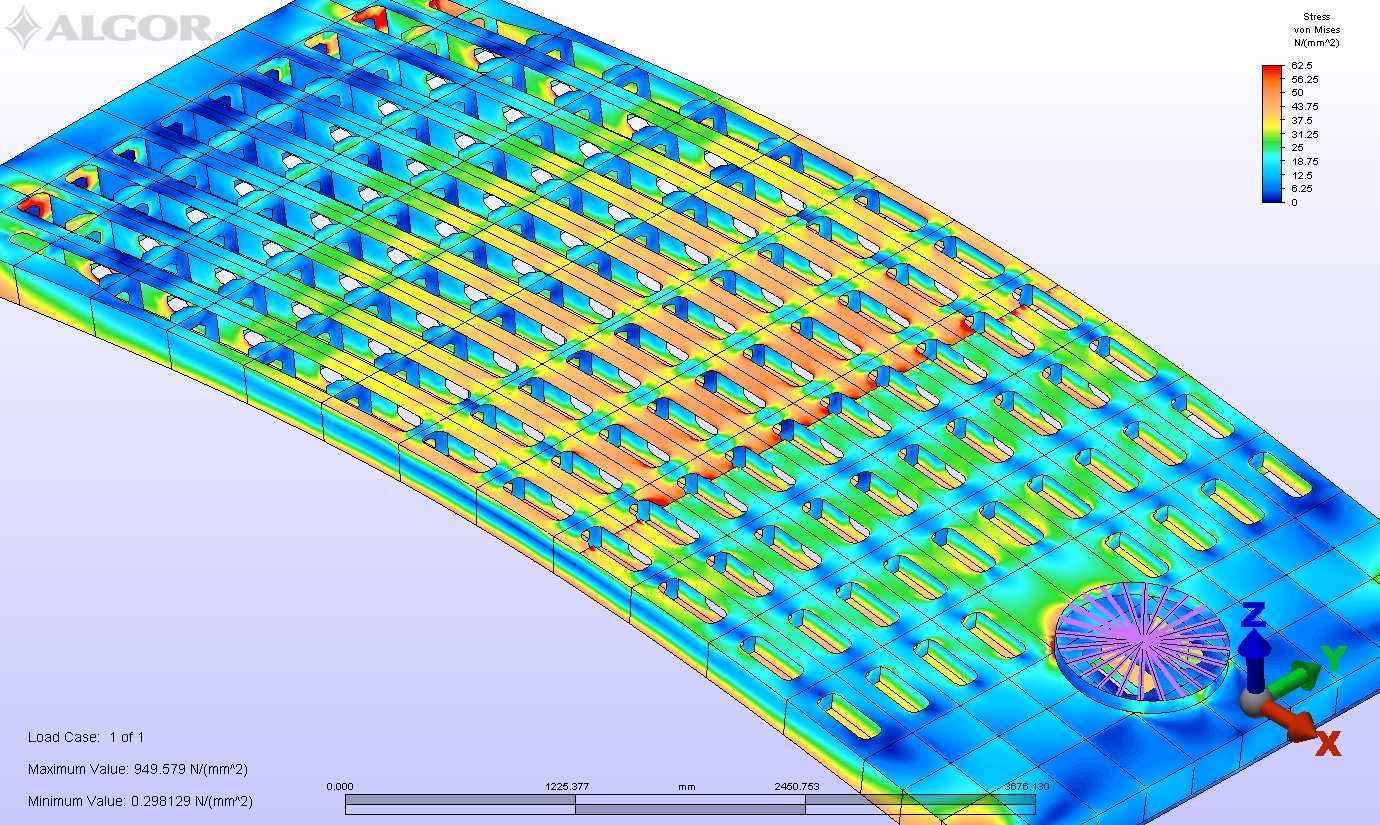 Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.11 abril 2025
Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.11 abril 2025 -
 Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect11 abril 2025
Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect11 abril 2025 -
 Average Values of Withdrawal Strength (N/mm 2 )11 abril 2025
Average Values of Withdrawal Strength (N/mm 2 )11 abril 2025 -
 High-strength steel for big parts11 abril 2025
High-strength steel for big parts11 abril 2025
você pode gostar
-
 Kena: Bridge of Spirits: Deluxe Edition, Maximum Games, PlayStation 5, 81429001756911 abril 2025
Kena: Bridge of Spirits: Deluxe Edition, Maximum Games, PlayStation 5, 81429001756911 abril 2025 -
 Attack on Titan 2 - A.O.T.2 on Steam11 abril 2025
Attack on Titan 2 - A.O.T.2 on Steam11 abril 2025 -
 Inspiroy H950P (Lords Mobile Edition)11 abril 2025
Inspiroy H950P (Lords Mobile Edition)11 abril 2025 -
 All Ultra Beasts Pokémon Sprites11 abril 2025
All Ultra Beasts Pokémon Sprites11 abril 2025 -
 Microsoft Flight Simulator Massive File Size Revealed11 abril 2025
Microsoft Flight Simulator Massive File Size Revealed11 abril 2025 -
 ManageIQ - Releases11 abril 2025
ManageIQ - Releases11 abril 2025 -
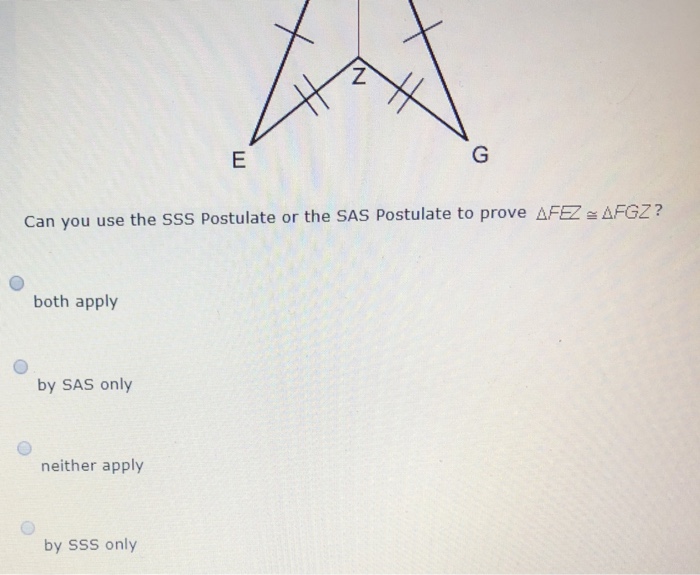
Solved Can you use the SSS Postulate or the SAS Postulate to11 abril 2025
-
Pou No Face - Pou No Face #Builderman11 abril 2025
-
 MotoGP – Os recordes, estatísticas e momentos para recordar da11 abril 2025
MotoGP – Os recordes, estatísticas e momentos para recordar da11 abril 2025 -
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/4/5/BvifdySTe4ReW45GpihA/2014-05-13-xbox-one-sem-kinect-399-9-junho.jpg) Resumo da semana em jogos: Xbox One sem Kinect e Far Cry 4 são destaques11 abril 2025
Resumo da semana em jogos: Xbox One sem Kinect e Far Cry 4 são destaques11 abril 2025