Sensors, Free Full-Text
Por um escritor misterioso
Last updated 31 março 2025
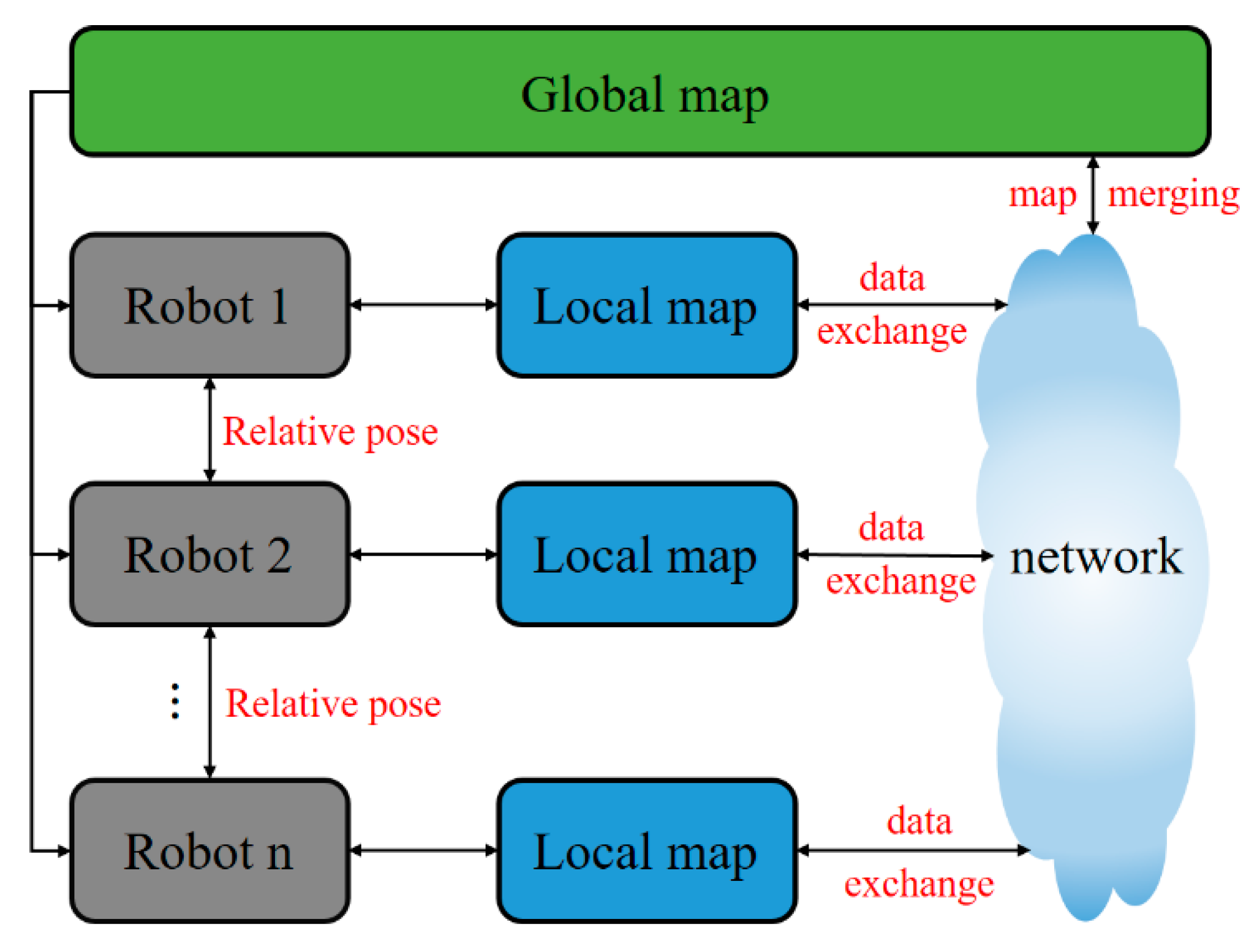
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

Sensaphone IMS Solution water sensor - IMS-4830E - Proximity Cards

TEKSCAN Pressure Mapping / Force Measurement / Tactile Sensor 3000

Sensors and Actuators B: Chemical, Journal

Advanced Materials: Early View

Applied Research - Wiley Online Library
Freestyle Libre 2 Sensor $160.93/Each Modern Medical Products
Journal of The Electrochemical Society - IOPscience
Tekscan Technology
Sensors, Free Full-Text

Bosch 0261230093 Original Equipment Fuel Pressure
Sensors, Free Full-Text

BOSCH Professional GIS 1000 C Thermo Bluetooth Thermal Camera
Sensors, Free Full-Text

ESPHome — ESPHome
Recomendado para você
-
Duda Ferrão Games31 março 2025
-
 MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA31 março 2025
MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA31 março 2025 -
 DESMAIEI NO MEIO DO JOGO!31 março 2025
DESMAIEI NO MEIO DO JOGO!31 março 2025 -
 Confira os atletas convocados para os Jogos Sul-americanos31 março 2025
Confira os atletas convocados para os Jogos Sul-americanos31 março 2025 -
chika gadando os civil #fivemrp #grotarp #complexorp @_31 março 2025
-
 Petición · LET E3 RETURN IN ITS PHYSICAL AND DIGITAL FORMAT ITS31 março 2025
Petición · LET E3 RETURN IN ITS PHYSICAL AND DIGITAL FORMAT ITS31 março 2025 -
 Microorganisms, Free Full-Text31 março 2025
Microorganisms, Free Full-Text31 março 2025 -
Colégio Toth Ribeirão Pires SP31 março 2025
-
 Petición · Medal Of Honor: Allied Assault Remastered ·31 março 2025
Petición · Medal Of Honor: Allied Assault Remastered ·31 março 2025 -
 Sustainability, Free Full-Text31 março 2025
Sustainability, Free Full-Text31 março 2025



você pode gostar
-
 Mikhail, Sirius the Jaeger Wiki31 março 2025
Mikhail, Sirius the Jaeger Wiki31 março 2025 -
 Tier 3 Egg, Pet Ranch Simulator Wiki31 março 2025
Tier 3 Egg, Pet Ranch Simulator Wiki31 março 2025 -
 Página Senhor dos Anéis #70117 (Filmes) para colorir – Páginas31 março 2025
Página Senhor dos Anéis #70117 (Filmes) para colorir – Páginas31 março 2025 -
 Where is Eevee in fire red?31 março 2025
Where is Eevee in fire red?31 março 2025 -
 Mc Ratão Boombastic (Shaggy) HD31 março 2025
Mc Ratão Boombastic (Shaggy) HD31 março 2025 -
Adrenaline RC - USRC Toys For Tots Race31 março 2025
-
 Conheces estas expressões algarvias?! - umacartaforadobaralho31 março 2025
Conheces estas expressões algarvias?! - umacartaforadobaralho31 março 2025 -
 Miles Tails Prower, Sonic Wiki Zone31 março 2025
Miles Tails Prower, Sonic Wiki Zone31 março 2025 -
 Foto De Stock Vetor De Fundo Preto E Branco De Fogo, Royalty-Free31 março 2025
Foto De Stock Vetor De Fundo Preto E Branco De Fogo, Royalty-Free31 março 2025 -
 ROBLOX Lápis Caixa De Papelaria Jogo Lápis Periférico Papelaria Caneta Saco De Armazenamento Lápis Caneta Multi-camada Grande Capacidade - AliExpress31 março 2025
ROBLOX Lápis Caixa De Papelaria Jogo Lápis Periférico Papelaria Caneta Saco De Armazenamento Lápis Caneta Multi-camada Grande Capacidade - AliExpress31 março 2025